Project Introduction
As part of my Simulation for Human Movement (ME485) and Engineering Design Optimization (AA222) coursework at Stanford, my team explored the predictive ability of various neural networks to predict ground reaction forces (GRF) from electromyography (EMG) sensor data inputs.
Abstract
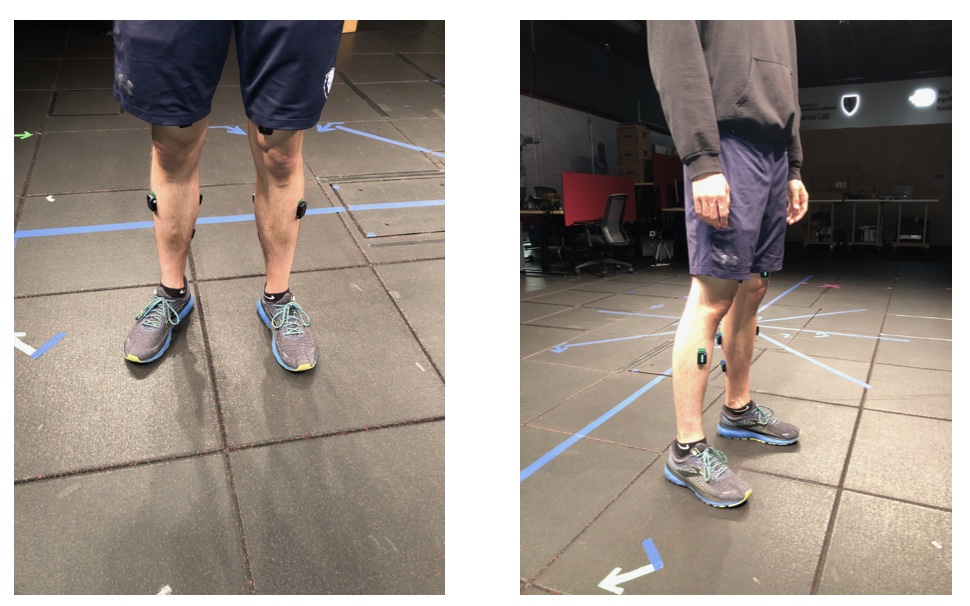
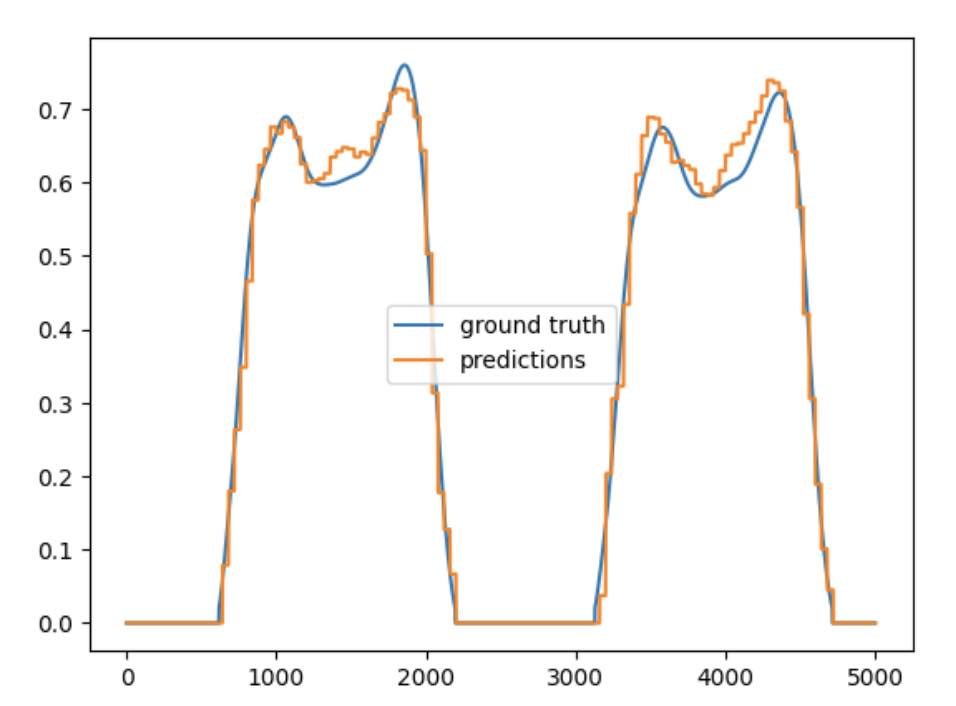
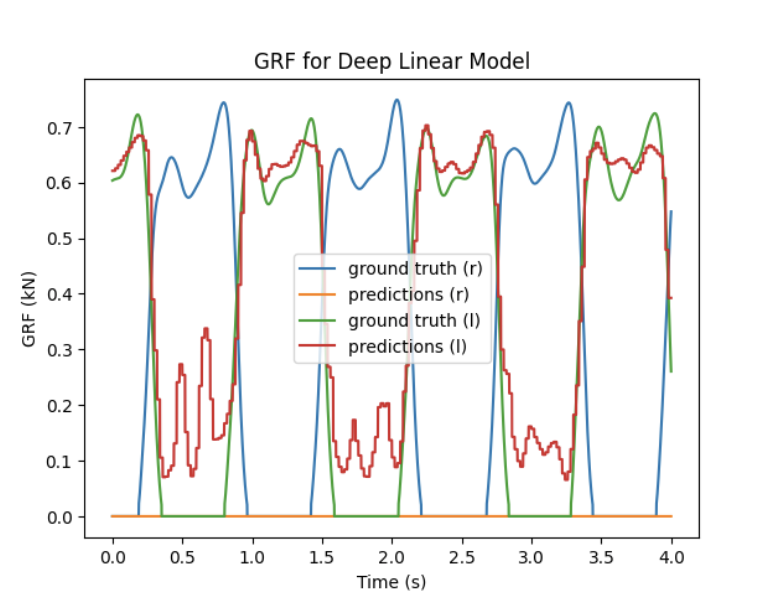
The development of musculoskeletal models allows us to diagnose and treat pathological movement patterns as well as evaluate and increase athletic performance. High quality models are typically the result of over-constrained optimization problems informed by many measurements. Electromyography (EMG) measures muscle activation, internal measurement units (IMUs) measure movement, force plates measure ground reaction forces (GRFs), and motion-capture systems measure kinematics. GRFs are foundational in many biomechanical analyses but their direct measurement typically limits the scope of a study because force plates restrict the field through which a subject can move. In contrast, EMG measurements can be gathered remotely with untethered sensors attached directly to the subject. Consequently, indirect measurement of GRFs, predicted via a model, would allow for a wider variety of experiments. Here we demonstrate that machine learning architectures are capable of modeling the relationship between EMG data and GRFs and can compute GRF estimations in real time. We evaluate the performance of four neural networks trained on paired EMG and GRF data captured as three subjects walked at a steady pace. The models can independently predict forces for each limb and identify gait cycle features like heel-contact and push-off. While this study only examines subjects with typical gait patterns performing a single activity, the success of the models motivates more analysis of how we can indirectly measure GRFs. More broadly, results like this validate tactics to design studies with a wider variety of motions, not limited to the area covered by a force plate.
EMG 2 GRF
Predicting Ground Reaction Forces with EMG Data: A Neural Network Approach
Contributions & Outcomes
I facilitated data collection in the Stanford Human Performance Lab. I was also responsible for processing thee EMG data byy rectifying, normalizing, and filtering the signal. I was also responsible for exploring different neural networks such as fully connected and WaveNet architectures to optimize performance. This required reading in the data, creating PyTorch models, and developing training and evaluation Classes to appropriately perform experiments.
Technical Skills
- Deep Learning
- Convolutional Neural Networks
- Python
- Data Science
- PyTorch
- Research
- Machine Learning